Saturday, November 27, 2010
Rack and Pinion Rover--Demo Video
Here's a quick video of how the robot functions. I was planning on detaching the ultrasonic sensor and replacing it with the IR sensor for a roving line bot design, but I have other projects in mind and will be dismantling this model in the next few days.
Rack and Pinion Rover
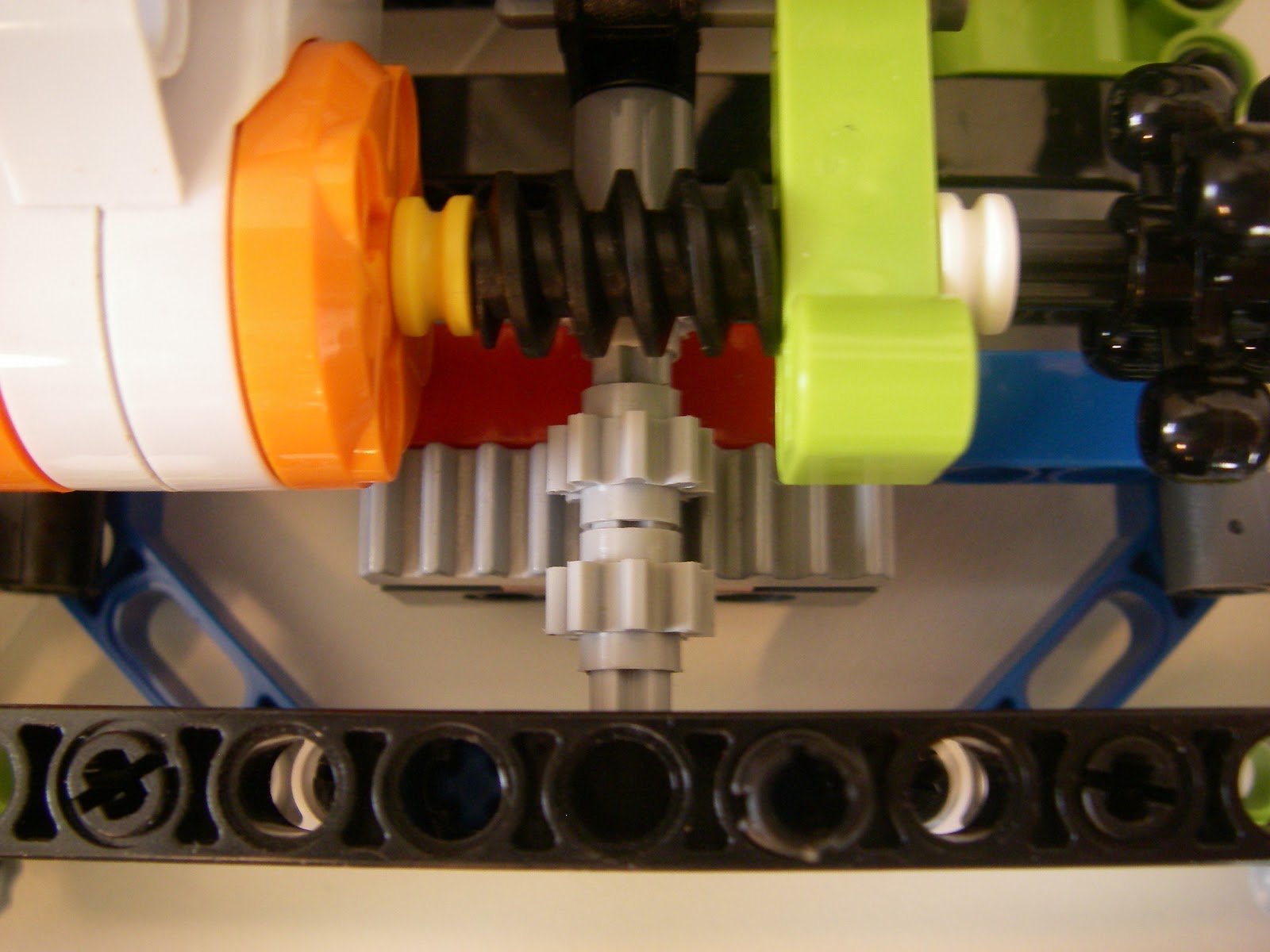
This robot was designed to roam a space autonomously and avoid obstacles. The ultrasonic sensor mounted on the front senses obstacles within a close proximity and prompts the robot to turn and back, then straighten out the wheels and move forward again. A sound sensor initiates the program. All of my robots are based on Mindstorms by Lego. I've uploaded some pictures of the rack and pinion steering, which was the main focus of the bot:

















Subscribe to:
Posts (Atom)